PyMC3 with labeled coords and dims#
Go crazy with your virtual label-maker!

Important
This blog post uses version 3.x of PyMC. PyMC 4.0 is already available and with it even better labeling support and an updated version of this same blogpost using PyMC 4.0
import arviz as az
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import pymc3 as pm
import theano.tensor as tt
rng = np.random.default_rng()
az.style.use("arviz-darkgrid")
For the of labeled arrays#
For all of us who love labeled arrays, PyMC 3.9.0 came with some amazing news: support for using coordinate and dimension names to specify the shapes of variables in a pm.Model. While this is good news by its own merit, its seamless integration with ArviZ even more impactful and relevant.
This post will focus on using PyMC3 coords and dims and the conversion of traces and models to InferenceData using arviz.from_pymc3. To see InferenceData in action, refer to this example in PyMC docs.
We will use an example based approach and use models from the example gallery to illustrate how to use coords and dims within PyMC3 models.
1st example: rugby analytics#
We will use an alternative parametrization of the same model used in the rugby analytics example taking advantage of dims and coords. Here, we will use as observations a 2d matrix, whose rows are the matches and whose columns are the field: home and away.
The first step after preprocessing is to define the dimensions used by the model and their coordinates. In our case, we have 3 dimensions:
team: each team will have its own offensive and defensive powermatch: an integer identifying the match. There are 6 teams who play twice against each other so we have6*5*2=60matchesfield: either home or away.
These coordinates are passed to pm.Model as a dict whose keys are dimension names and whose values are coordinate values. The dimensions can then be used when defining PyMC3 variables to indicate their shape.
df_rugby = pd.read_csv(pm.get_data('rugby.csv'), index_col=0)
home_idx, teams = pd.factorize(df_rugby["home_team"], sort=True)
away_idx, _ = pd.factorize(df_rugby["away_team"], sort=True)
coords = {
"team": teams,
"match": np.arange(60),
"field": ["home", "away"],
}
with pm.Model(coords=coords) as rugby_model:
# global model parameters
home = pm.Flat('home')
sd_att = pm.HalfStudentT('sd_att', nu=3, sigma=2.5)
sd_def = pm.HalfStudentT('sd_def', nu=3, sigma=2.5)
intercept = pm.Flat('intercept')
# team-specific model parameters
atts_star = pm.Normal("atts_star", mu=0, sigma=sd_att, dims="team")
defs_star = pm.Normal("defs_star", mu=0, sigma=sd_def, dims="team")
atts = pm.Deterministic('atts', atts_star - tt.mean(atts_star), dims="team")
defs = pm.Deterministic('defs', defs_star - tt.mean(defs_star), dims="team")
home_theta = tt.exp(intercept + home + atts[home_idx] + defs[away_idx])
away_theta = tt.exp(intercept + atts[away_idx] + defs[home_idx])
# likelihood of observed data
points = pm.Poisson(
'home_points',
mu=tt.stack((home_theta, away_theta)).T,
observed=df_rugby[["home_score", "away_score"]],
dims=("match", "field")
)
rugby_trace = pm.sample(1000, tune=1000, cores=4)
Auto-assigning NUTS sampler...
Initializing NUTS using jitter+adapt_diag...
Multiprocess sampling (4 chains in 4 jobs)
NUTS: [defs_star, atts_star, intercept, sd_def, sd_att, home]
Sampling 4 chains for 1_000 tune and 1_000 draw iterations (4_000 + 4_000 draws total) took 13 seconds.
The number of effective samples is smaller than 25% for some parameters.
We have now defined the shapes or our variables, which is convenient and helps understanding the code, but the dimensions and coordinates are lost during sampling. pm.MultiTrace objects do not store the labeled coordinates of their variables.
print(rugby_trace)
print(rugby_trace["atts"])
<MultiTrace: 4 chains, 1000 iterations, 10 variables>
[[ 0.17387955 -0.02422528 0.13753953 -0.36843038 -0.04525461 0.1264912 ]
[ 0.25936021 -0.10837995 0.14656402 -0.2846651 -0.16805903 0.15517984]
[ 0.24825271 -0.10056153 0.05230409 -0.23062107 -0.10570005 0.13632584]
...
[ 0.24992917 -0.0886659 0.08541612 -0.32679123 -0.04984795 0.1299598 ]
[ 0.25626853 -0.07558793 0.14828311 -0.36233563 -0.19319771 0.22656963]
[ 0.25679719 -0.12705182 0.12258069 -0.29169309 -0.11814407 0.1575111 ]]
To also take advantage of the labeled coords and dims for exploratory analysis of the results, we have to convert the results to az.InferenceData. This can be done with az.from_pymc3 or using the return_inferencedata=True argument in pm.sample. To avoid having to resample again, we will use the former and use the latter in the second example.
ArviZ is aware of the model context, and will use it to get the coords and dims automatically. If necessary however, we may also modify or add dimensions or coordinates using the dims/coords arguments of from_pymc3. We’ll also see an example of this afterwards.
rugby_idata = az.from_pymc3(rugby_trace, model=rugby_model)
rugby_idata
Inference data with groups: > posterior > log_likelihood > sample_stats > observed_data
2nd example: radon multilevel model#
We will now use one of the many models in the A Primer on Bayesian Methods for Multilevel Modeling notebook to dive deeper into coords and dims functionality. We won’t cover the model itself, it’s already explained in the example notebook, we will explain in detail how are labeled coords and dims being used.
The code used to load and clean the data is hidden, click the button below to see it.
Show code cell source
srrs2 = pd.read_csv(pm.get_data("srrs2.dat"))
srrs2.columns = srrs2.columns.map(str.strip)
srrs_mn = srrs2[srrs2.state == "MN"].copy()
srrs_mn["fips"] = srrs_mn.stfips * 1000 + srrs_mn.cntyfips
cty = pd.read_csv(pm.get_data("cty.dat"))
cty_mn = cty[cty.st == "MN"].copy()
cty_mn["fips"] = 1000 * cty_mn.stfips + cty_mn.ctfips
srrs_mn = srrs_mn.merge(cty_mn[["fips", "Uppm"]], on="fips")
srrs_mn = srrs_mn.drop_duplicates(subset="idnum")
u = np.log(srrs_mn.Uppm).unique()
n = len(srrs_mn)
srrs_mn.county = srrs_mn.county.map(str.strip)
srrs_mn["county_code"], mn_counties = pd.factorize(srrs_mn.county)
srrs_mn["log_radon"] = np.log(srrs_mn.activity + 0.1)
The first step is again defining the dimensions and their coordinate values:
Level: observations can correspond to the basement or the first floorobs_id: unique integer identifying each observationCounty: each county has its own basement, intercept:a, and first floor, slopeb, effects. Details are in the example notebookparam: one ofa,bparam_bis: same as param, used for the covariance matrix because a variable can’t have repeated dimensions
coords = {
"Level": ["Basement", "Floor"],
"obs_id": np.arange(n),
"County": mn_counties,
"param": ["a", "b"],
"param_bis": ["a", "b"],
}
We’ll begin to define the model creating the indexing arrays that will implement the hierarchical model. We are using the pm.Data container to tell ArviZ to store the variables in the constant_data group. Moreover, pm.Data defines a theano shared variable, so its values can be modified in order to call pm.sample_posterior_predictive using different data. This is particularly interesting for regressions for example in order to generate predictions for the model.
with pm.Model(coords=coords) as radon_model:
floor_idx = pm.Data("floor_idx", srrs_mn.floor, dims="obs_id")
county_idx = pm.Data("county_idx", srrs_mn.county_code, dims="obs_id")
We’ll also use a LKJCholeskyCovas prior for the covariance matrix. As you can see, it has no dims argument. Given that we are going to use return_inferencedata=True here in order to get an InferenceData directly as a result of pm.sample, we will have to indicate the dims that correspond to these variables as idata_kwargs. idata_kwargs is used to indicate pm.sample what arguments to pass to az.from_pymc3, which is called internally to convert the trace to InferenceData.
with radon_model:
sd_dist = pm.Exponential.dist(0.5)
a = pm.Normal("a", mu=0.0, sigma=5.0)
b = pm.Normal("b", mu=0.0, sigma=1.0)
z = pm.Normal("z", 0.0, 1.0, dims=("param", "County"))
chol, corr, stds = pm.LKJCholeskyCov(
"chol", n=2, eta=2.0, sd_dist=sd_dist, compute_corr=True
)
We now will store two intermediate results as variables. However, one is wrapped inside a pm.Deterministic whereas the other is not. Both are equally valid. pm.Deterministic tells PyMC3 to store that variable in the trace. Thus pm.Deterministic should only be used when we actively want to store the intermediate result. In our case, we want to store ab_county but not theta.
with radon_model:
ab_county = pm.Deterministic("ab_county", tt.dot(chol, z).T, dims=("County", "param"))
theta = a + ab_county[county_idx, 0] + (b + ab_county[county_idx, 1]) * floor_idx
sigma = pm.Exponential("sigma", 1.0)
y = pm.Normal("y", theta, sigma=sigma, observed=srrs_mn.log_radon, dims="obs_id")
Finally we will call pm.sample with return_inferencedata=True and defining the dimensions of the covariance matrix as idata_kwargs.
with radon_model:
radon_idata = pm.sample(
2000, tune=2000, target_accept=0.99, random_seed=75625, return_inferencedata=True,
idata_kwargs={"dims": {"chol_stds": ["param"], "chol_corr": ["param", "param_bis"]}}
)
Auto-assigning NUTS sampler...
Initializing NUTS using jitter+adapt_diag...
Multiprocess sampling (4 chains in 4 jobs)
NUTS: [sigma, chol, z, b, a]
Sampling 4 chains for 2_000 tune and 2_000 draw iterations (8_000 + 8_000 draws total) took 197 seconds.
The number of effective samples is smaller than 25% for some parameters.
There is life outside the posterior#
The posterior is the center of Bayesian analysis but other quantities such as the prior or the posterior predictive are also crucial to an analysis workflow. We’ll use a linear regression to quickly showcase some of the key steps in a Bayesian workflow: prior predictive checks, posterior sampling, posterior predictive checks (using LOO-PIT) and out of sample predictions.
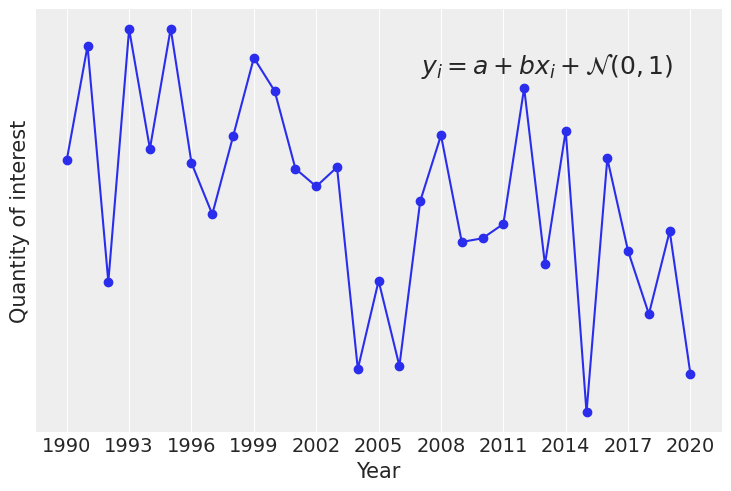
We will start generating some simulated data (code hidden, click to expand) and defining the model. As it’s a simple linear regression we’ll only have scalar parameters, a, b and sigma.
#collapse
a_ = 2
b_ = -0.4
x_ = np.linspace(0, 10, 31)
year_ = np.arange(2021-len(x_), 2021)
y_ = a_ + b_ * x_ + rng.normal(size=len(x_))
fig, ax = plt.subplots()
ax.plot(x_, y_, "o-")
ax.text(
0.93, 0.9, r"$y_i = a + bx_i + \mathcal{N}(0,1)$", ha='right', va='top', transform=ax.transAxes, fontsize=18
)
ax.set_xticks(x_[::3])
ax.set_xticklabels(year_[::3])
ax.set_yticks([])
ax.set_xlabel("Year")
ax.set_ylabel("Quantity of interest");
coords = {"year": year_}
with pm.Model(coords=coords) as linreg_model:
x = pm.Data("x", x_, dims="year")
a = pm.Normal("a", 0, 3)
b = pm.Normal("b", 0, 2)
sigma = pm.HalfNormal("sigma", 2)
y = pm.Normal("y", a + b * x, sigma, observed=y_, dims="year")
We have now written a model in order to study our super interesting quantity y. We have used everything we have seen so far, the pm.Data container and the labeled dims and coords. We will now simulate a workflow starting from prior predictive checks and finishing with predicting the values of our quantity of interest in 2021 and 2022.
Priors#
We start by sampling both prior and prior predictive with pm.sample_prior_predictive. This will generate a dictionary whose keys are variable names and whose values are numpy arrays. We can then pass this dictionary to az.from_pymc3 as the prior argument. ArviZ will then use the information in the pm.Model instance to 1) split the variables between prior and prior_predictive groups, 2) fill the observed_data and constant_data groups and 3) get the dims and coords if present.
with linreg_model:
prior = pm.sample_prior_predictive(700)
linreg_idata = az.from_pymc3(prior=prior)
linreg_idata
Inference data with groups: > prior > prior_predictive > observed_data
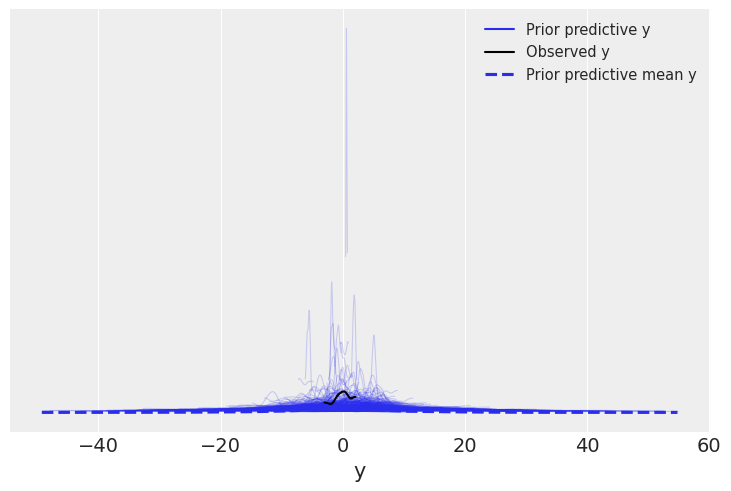
We can now use plot_ppc to perform prior predictive checks for our model.
az.plot_ppc(linreg_idata, group="prior");
Posterior#
The next step will be computing the posterior. As we have seen, we can use return_inferencedata to get an InferenceData as a result of pm.sample. In this case however, we will store it as an auxiliary variable to then use InferenceData.extend and add the new groups to the linreg_idata.
with linreg_model:
idata_aux = pm.sample(return_inferencedata=True)
linreg_idata.extend(idata_aux)
Auto-assigning NUTS sampler...
Initializing NUTS using jitter+adapt_diag...
Multiprocess sampling (4 chains in 4 jobs)
NUTS: [sigma, b, a]
Sampling 4 chains for 1_000 tune and 1_000 draw iterations (4_000 + 4_000 draws total) took 4 seconds.
The acceptance probability does not match the target. It is 0.879454342399517, but should be close to 0.8. Try to increase the number of tuning steps.
linreg_idata
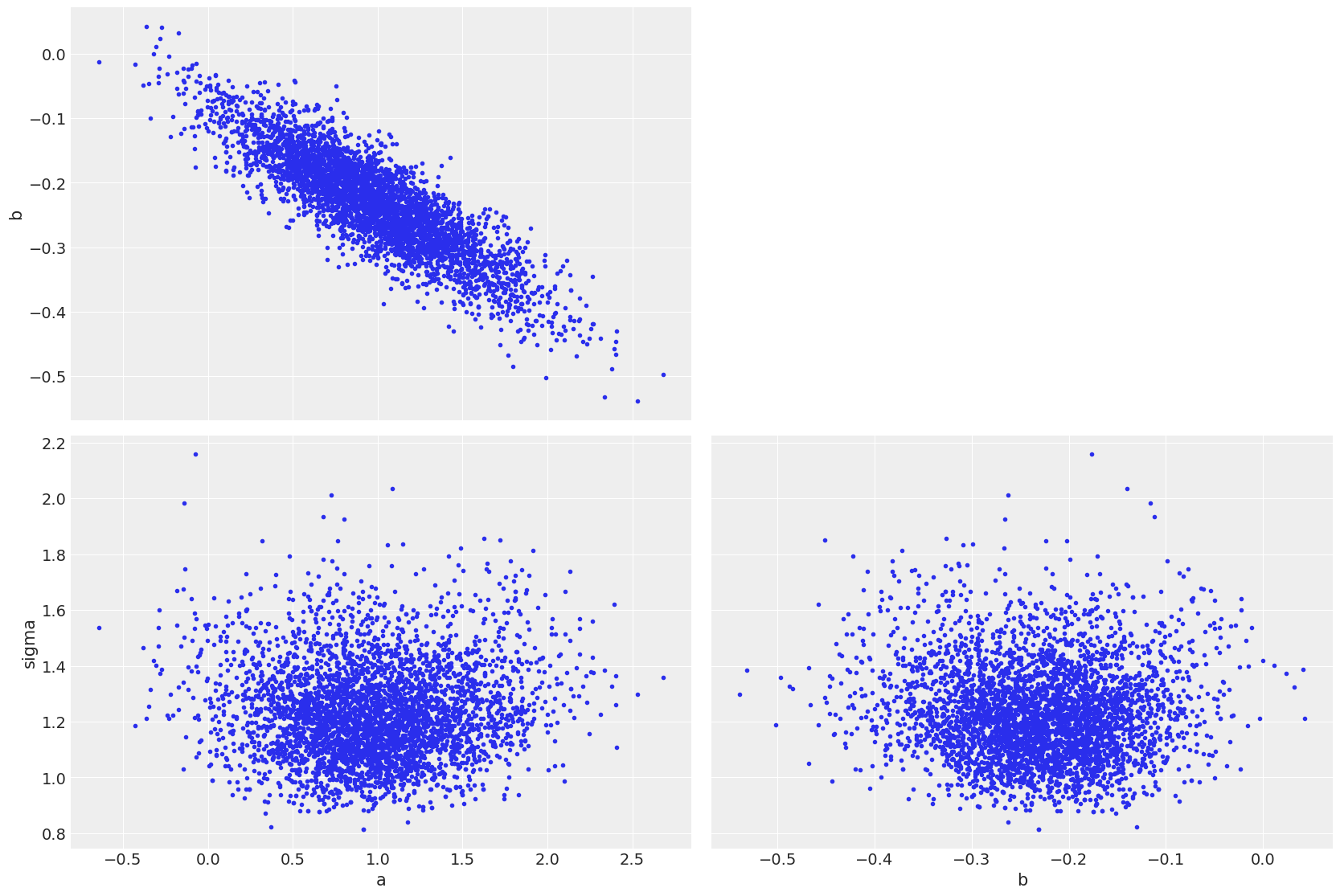
Inference data with groups: > prior > prior_predictive > observed_data > posterior > log_likelihood > sample_stats > constant_data
az.plot_pair(linreg_idata);
Posterior predictive#
Our third step will be to evaluate the posterior predictive at the observations so we can perform model checking with functions such as plot_ppc or plot_loo_pit. Here again we are using the extend trick to keep all our data as part of the same InferenceData. This has two main advantages. plot_loo_pit requires both the posterior_predictive group, generated here and the log_likelihood group which was created in pm.sample. In addition, keeping all our data in a single InferenceData means we can store it as a netCDF and share a single file to allow reproducing the whole exploratory analysis of our model.
with linreg_model:
post_pred = pm.sample_posterior_predictive(linreg_idata)
idata_aux = az.from_pymc3(posterior_predictive=post_pred)
linreg_idata.extend(idata_aux)
linreg_idata
Inference data with groups: > prior > prior_predictive > observed_data > posterior > log_likelihood > sample_stats > constant_data > posterior_predictive
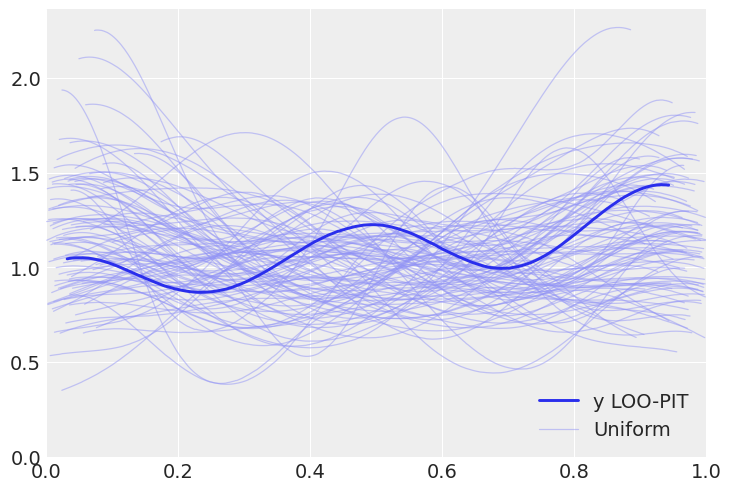
We will now get to use plot_loo_pit, which as expected does not show any issues. To learn how to interpret those plots, you can read the LOO-PIT tutorial.
az.plot_loo_pit(linreg_idata, y="y");
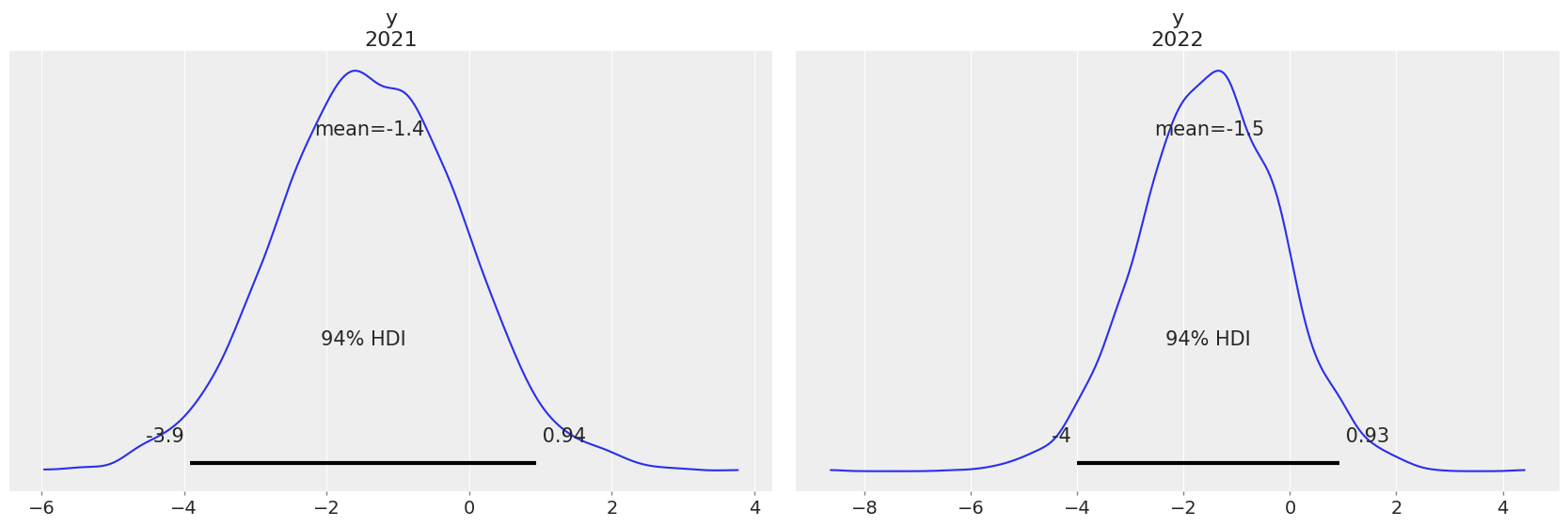
Predictions#
Finally, our last step will be to get some predictions, which in this case is evaluating the posterior predictive at positions different than the observations. In the example below, we are evaluating our predictions at 2021 and 2020. To do so, we are using pm.set_data to modify the values of x to the ones that correspond to these two future years.
Here we will use from_pymc3_predictions instead of from_pymc3+extend. from_pymc3_predictions combines functionality from both of these functions and let’s the user choose how to handle predictions depending on the goal at hand: if idata_orig is not present, the returned object will be an InferenceData containing only the predictions groups; if idata_orig is present and inplace=False the returned InferenceData will be a copy of idata_orig with the predictions groups added, and with inplace=True there is no returned object, the preditcions groups are added to idata_orig which is not returned.
with linreg_model:
pm.set_data({"x": x_[-1] + x_[1:3]})
predictions = pm.sample_posterior_predictive(linreg_idata)
az.from_pymc3_predictions(
predictions, coords={"year": [2021, 2022]}, idata_orig=linreg_idata, inplace=True
)
linreg_idata
Inference data with groups: > posterior > posterior_predictive > predictions > log_likelihood > sample_stats > prior > prior_predictive > observed_data > constant_data > predictions_constant_data
az.plot_posterior(linreg_idata, group="predictions");
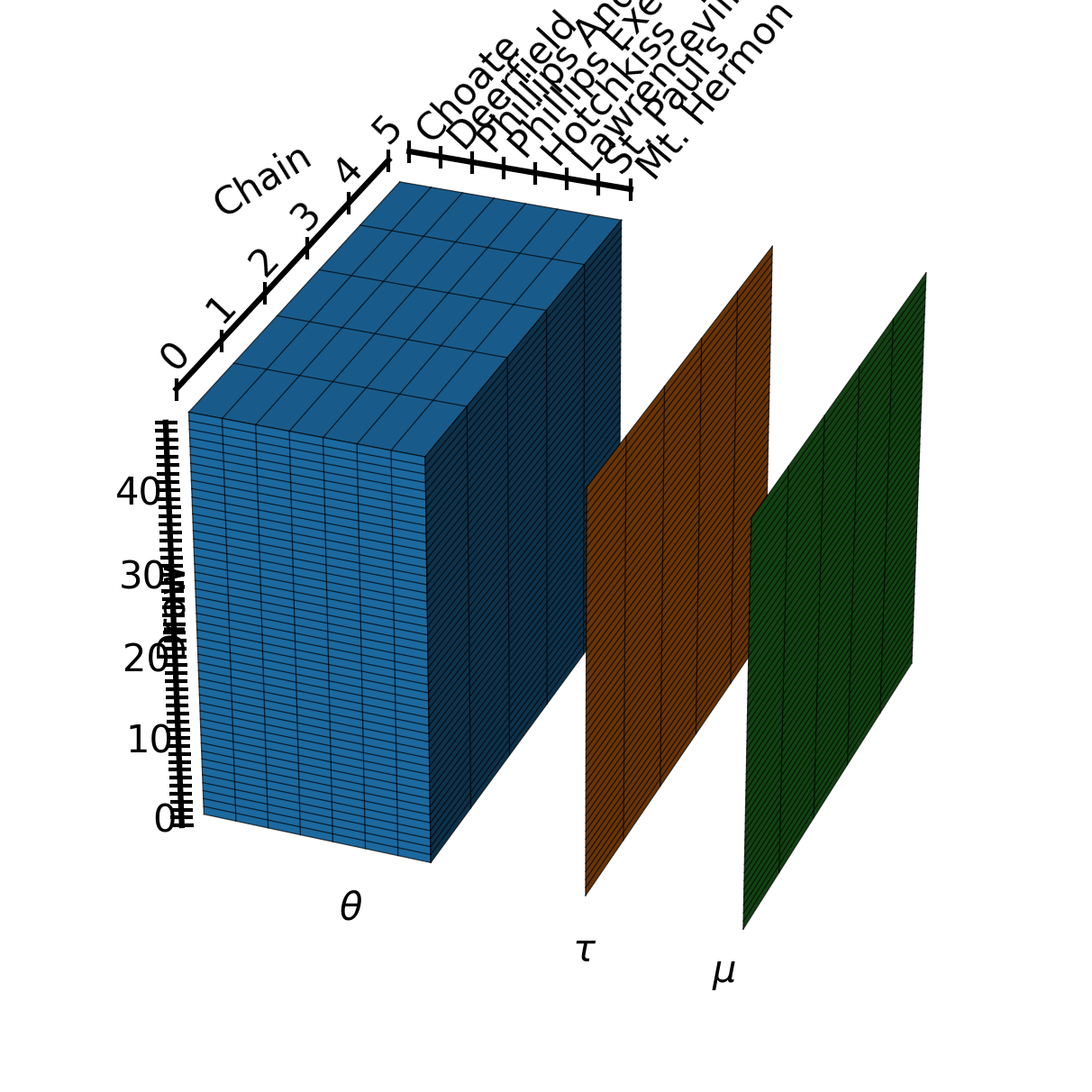
Extra: generating the post image#
Here is the code used to generate the summary image for this post. Take a look if you want to use matplotlib to create array diagrams!
import matplotlib
plt.rcParams.update(matplotlib.rcParamsDefault)
from mpl_toolkits.mplot3d import Axes3D
points = np.array([
[-1, -1, -1],
[1, -1, -1 ],
[1, 1, -1],
[-1, 1, -1],
[-1, -1, 1],
[1, -1, 1 ],
[1, 1, 1],
[-1, 1, 1]
])
fig = plt.figure(dpi=300)
ax = fig.add_axes([0, .05, 1, .8], projection='3d')
side = 3
r = side * np.array([-1,1])
one_2d = side * np.ones((1,1))
one_1d = side * np.ones(1)
X, Y = np.meshgrid(r, r)
################
### theta ###
################
ax.plot_surface(X,Y,one_2d, color="C0", zorder=1)
ax.plot_surface(X,-one_2d,Y, color="C0", zorder=1)
ax.plot_surface(one_2d,X,Y, color="C0", zorder=1)
ax.text2D(0.3, 0.14, r"$\theta$", transform=ax.transAxes)
# school dim
school_grid = np.linspace(-1, 1, 8) * side
school_one = np.ones_like(school_grid) * side * 1.1
schools = np.array(["Choate", "Deerfield", "Phillips Andover", "Phillips Exeter",
"Hotchkiss", "Lawrenceville", "St. Paul's", "Mt. Hermon"])
ax.plot(school_grid, school_one, school_one, marker="|", color="k")
for school, pos in zip(schools, school_grid):
ax.text(pos, side*1.1, side*1.15, f"{school}", zdir="y", clip_on=False)
# chain dim
chain_grid = np.linspace(-1, 1, 6) * side
chain_one = np.ones_like(chain_grid) * side * 1.1
ax.plot(-chain_one, chain_grid, chain_one, marker="|", color="k")
for chain, pos in enumerate(chain_grid):
ax.text(-side*1.1, pos, side*1.15, f"{chain}", zdir="y", va="bottom", ha="center")
ax.text(-side*1.3, 0, side*1.3, "Chain", zdir=(1, 1, .2), va="bottom", ha="center")
# draw dim
draw_grid = np.linspace(-1, 1, 50) * side
draw_one = np.ones_like(draw_grid) * side * 1.1
draws = np.arange(0, 50, 10)
ax.plot(-draw_one, -draw_one, draw_grid, marker="_", color="k")
for draw, pos in zip(draws, draw_grid[draws]):
ax.text(-side*1.1, -side*1.15, pos, f"{draw}", zdir=None, ha="right")
ax.text2D(0.12, 0.4, "Draw", transform=ax.transAxes, rotation="vertical")
################
### tau ###
################
ax.plot_surface(4+one_2d,X,Y, color="C1", zorder=1)
ax.text2D(0.525, 0.1, r"$\tau$", transform=ax.transAxes)
################
### mu ###
################
ax.plot_surface(8+one_2d,X,Y, color="C2", zorder=1)
ax.text2D(0.66, 0.08, r"$\mu$", transform=ax.transAxes)
################
### grids ###
################
grid = np.linspace(-1, 1, 10) * side
grid_one = np.ones(10)
lw = .3; alpha = .7
for chain_pos in chain_grid:
ax.plot(grid, grid_one * chain_pos, grid_one * side, color="k", alpha=alpha, zorder=3, lw=lw)
ax.plot(grid_one * side, grid_one * chain_pos, grid, color="k", alpha=alpha, zorder=5, lw=lw)
ax.plot(grid_one * side + 4, grid_one * chain_pos, grid, color="k", alpha=alpha, zorder=6, lw=lw)
ax.plot(grid_one * side + 8, grid_one * chain_pos, grid, color="k", alpha=alpha, zorder=7, lw=lw)
for draw_pos in draw_grid:
ax.plot(grid, -grid_one * side, grid_one * draw_pos, color="k", alpha=alpha, zorder=4, lw=lw)
ax.plot(grid_one * side, grid, grid_one * draw_pos, color="k", alpha=alpha, zorder=5, lw=lw)
ax.plot(grid_one * side + 4, grid, grid_one * draw_pos, color="k", alpha=alpha, zorder=6, lw=lw)
ax.plot(grid_one * side + 8, grid, grid_one * draw_pos, color="k", alpha=alpha, zorder=7, lw=lw)
for school_pos in school_grid:
ax.plot(grid_one * school_pos, grid, grid_one * side, color="k", alpha=alpha, zorder=4, lw=lw)
ax.plot(grid_one * school_pos, -grid_one * side, grid, color="k", alpha=alpha, zorder=4, lw=lw)
ax.axis("off");
ax.view_init(azim=-69)
#fig.savefig("labeled_arys.png", dpi=300)
Package versions used to generate this post:
%load_ext watermark
%watermark -n -u -v -iv -w
pymc3 3.9.3
matplotlib 3.3.1
pandas 1.1.1
numpy 1.19.1
arviz 0.10.0
xarray 0.16.1
last updated: Thu Sep 24 2020
CPython 3.6.9
IPython 7.16.1
watermark 2.0.2
Comments are not enabled for this post, to inquiry further about the contents of the post, ask on PyMC Discourse. Feel free to tag me at @OriolAbril